Pollution Mapping via Multi-Vehicle Sensor Networks
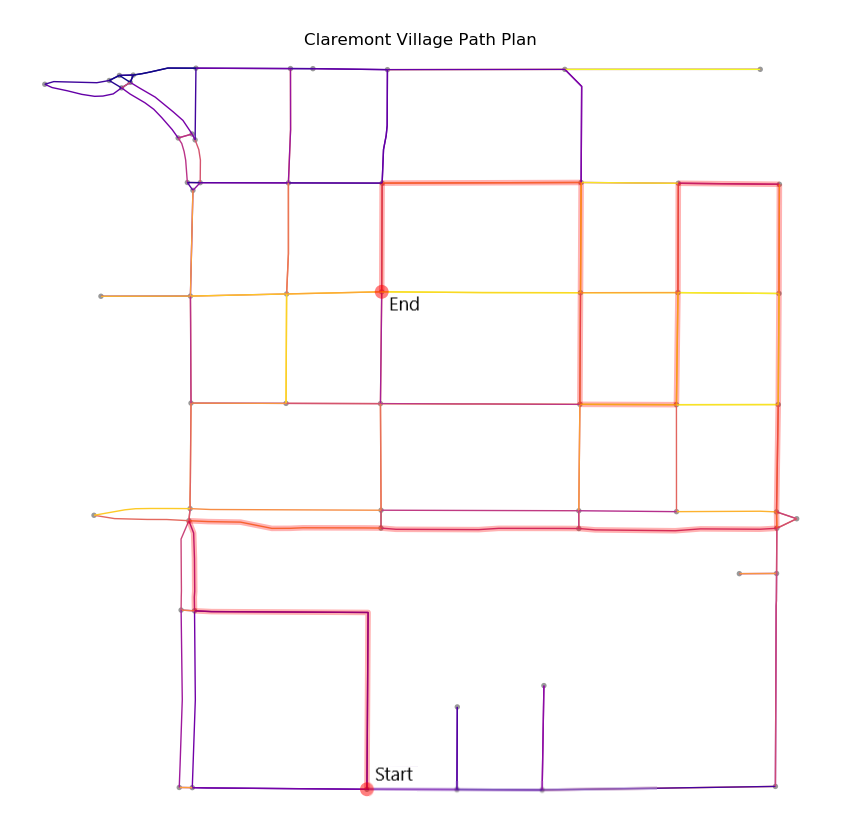
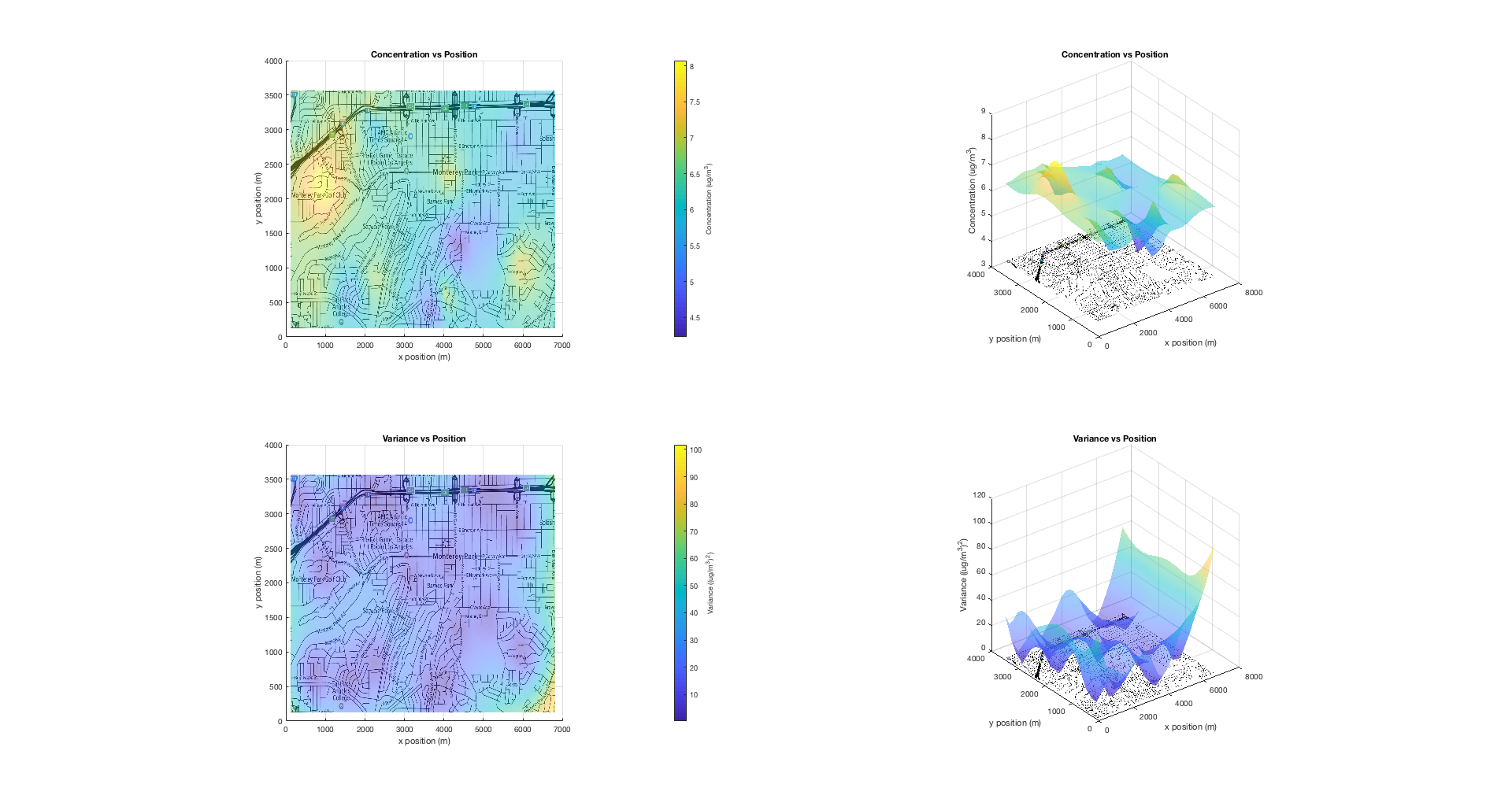
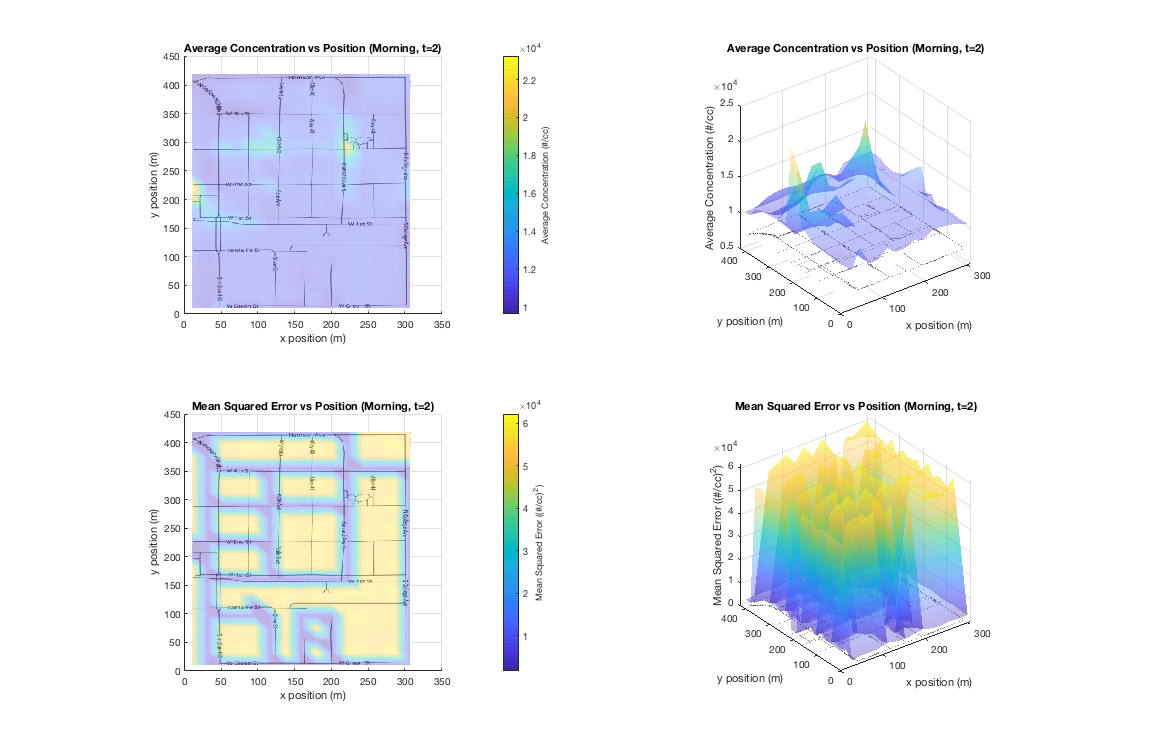
Starting Summer 2017, the LAIR has been collaborating with Prof. Lelia Hawkins to develop an intelligent, mobile air quality sampling platform. This project includes work on path planning for optimal information gain and pollution state estimation using a fixed rank filter.